题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
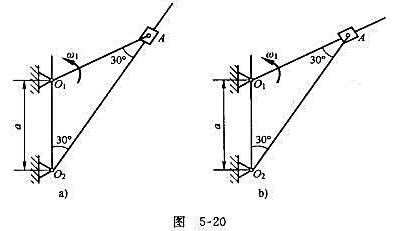
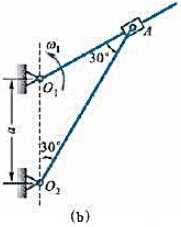
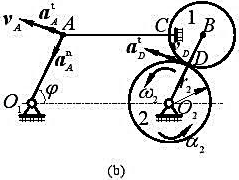
在图8-7a和图8-7b所示的2种机构中,已知O1O2=a=200mm,ω1=3rad/s。求图示位置时杆O2⌘
在图8-7a和图8-7b所示的2种机构中,已知O1O2=a=200mm,ω1=3rad/s。求图示位置时杆O2A的角速度。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在图8-7a和图8-7b所示的2种机构中,已知O1O2=a=200mm,ω1=3rad/s。求图示位置时杆O2A的角速度。
如果结果不匹配,请 联系老师 获取答案
 更多“在图8-7a和图8-7b所示的2种机构中,已知O1O2=a=…”相关的问题
更多“在图8-7a和图8-7b所示的2种机构中,已知O1O2=a=…”相关的问题
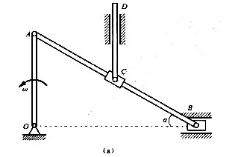
题7-36图(a)所示机构中,套简的铰链C和CD杆连接并套在AB杆上。已知OA=20cm, AB=40 cm,在图示瞬时a=30°,套筒在AB的中点,曲柄OA的角速度为w=4rad/s。试求此瞬时CD杆的速度大小和方向。
在图6-14所示操舵装置的周转轮系中,已知齿数z1=z4.(1)自动操舵时刹住舵轮A,这时复式电动机开动,执行电动机再通过行星轮系1-2-3-4-5及一些其他机构进行操舵,求传动比i15;(2)手动操舵时用控制杆锁住复式电动机,故轮1不动,这时松开舵轮A,并用它通过行星轮系4-3-2-1-5及一些其他机构进行操舵,求传动比i45.
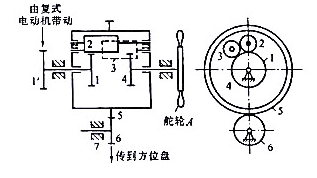
图6-14
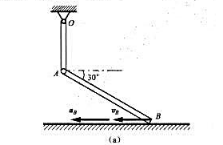
题7-24图(a)所示平面机构中,OA=12cm, AB=30cm,AB杆的B端以vB=2m/s, aB=1m/s'向左沿固定平面运动。在图示位置,OA处于铅垂位置,试求该瞬时,AB杆的角速度和角加速度。
 时,轮2的角速度和角加速度。
时,轮2的角速度和角加速度。
件的质量为m1=m2=m3=1kg,各构件的质心均位于铰链间的中点,构件2对其质心轴的转动惯量Js2=0.005kg·m2,曲柄的等角速度ω1=20rad/s.当曲柄和摇杆的轴线在铅直位置而连杆的轴线在水平位置时,用质量代换法求各构件的总惯性力.

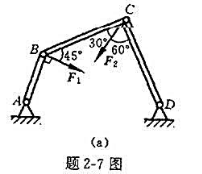
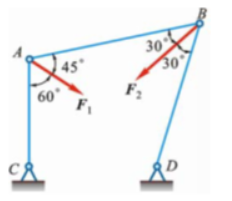
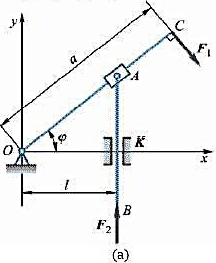
在四连杆机构ABCD的铰链B和C上分别作用有力F1和F2机构在题2-7图(a)所示位置平衡。试求平衡时力F1和F2的大小之间的关系。