如果结果不匹配,请
如果结果不匹配,请 
 更多“利用铅垂线和三角尺判断桌面是否水平,如图测7-6所示的做法正…”相关的问题
更多“利用铅垂线和三角尺判断桌面是否水平,如图测7-6所示的做法正…”相关的问题
第2题
水准测量是利用水准仪提供()求得两点高差,并通过其中一已知点的高程,推算出未知点的高程。A.铅垂
水准测量是利用水准仪提供()求得两点高差,并通过其中一已知点的高程,推算出未知点的高程。
A.铅垂线
B.视准轴
C.水准管轴线
D.水平视线
第3题
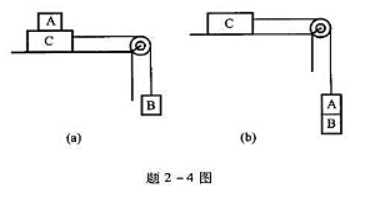
A、B、C三个物体,质量分别是mA=mB=0.1kg,mC=0.8kg.当把它们如图(a)所示放置时,物体
A、B、C三个物体,质量分别是mA=mB=0.1kg,mC=0.8kg.当把它们如图(a)所示放置时,物体系正好匀速运动. (1)求物体C与水平桌面间的摩擦因数;(2)如果将物体A移到物体B的上面,如图(b)所示,求系统的加速度及绳中张力(滑轮与绳的质量不计)。
第4题
如图甲所示,盛有水的薄壁圆柱形容器放在水平桌面上,容器的底面积为S,弹簧测力计下悬挂一个长方体金属块,从水面开始缓慢浸入水中,在金属块未触底且水未溢出的过程中,测力计示数F随金属块浸入水中深度h的关系图象如图乙所示.下列分析正确的是()
A.金属块逐渐浸入水中的过程,受到的浮力一直在减小
B.金属块的高度为h1
C.金属块的密度为F1F1-F2ρ水
D.金属块浸没后与入水前相比,水平桌面受到的压强增加F1-F2S
第6题
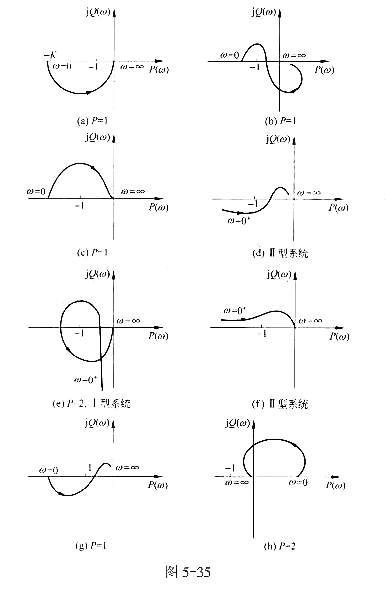
设系统的开环幅相频率特性如图5-35所示,写出开环传递函数的形式,并判断闭环系统是否稳定。图中
设系统的开环幅相频率特性如图5-35所示,写出开环传递函数的形式,并判断闭环系统是否稳定。图中P为开环传递函数在s右半平面的极点数。
第7题
(i)利用WAGEPRC.RAW中的数据,估计第11章习题5中的分布滞后模型。用回归教材(12.14)来检验AR(1)
(i)利用WAGEPRC.RAW中的数据,估计第11章习题5中的分布滞后模型。用回归教材(12.14)来检验AR(1)序列相关。
(ii)用迭代的科克伦-奥卡特方法重新估计这个模型。长期倾向的新估计值是多少?
(iii)用迭代C0求出LRP的标准误。(这要求你估计一个修正方程。)判断LRP估计值在5%的水平上是否统计显著异于1?
第8题
水平桌面上有A和B两个物体,分别受到F1和F2的拉力作用,两物体沿桌面做匀速直线运动。物体A运动的速度大小为v1,物体B运动的速度大小为v2。已知v1>v2。则下列判断正确的是()
A.由于v1>v2,所以F1>F2
B.由于v1>v2,所以F1做的功较多
C.由于v1>v2,所以F1做功的功率较大
D.由于匀速运动,所以A和B所受合力均为零
第9题
水平桌面上有两个完全相同的鱼缸甲和乙,盛有适量的水,把一个橡皮泥做的小船放入鱼缸乙中,小船处于漂浮状态,此时两鱼缸内的水面刚好相平。然后把它们分别放在台秤上,则台秤的示数()
A.甲放上时大
B.乙放上时大
C.一样大
D.无法判断