

 如果结果不匹配,请
如果结果不匹配,请 
 更多“试述二阶系统闭环频率特性与时域中阶跃响应之间的关系。”相关的问题
更多“试述二阶系统闭环频率特性与时域中阶跃响应之间的关系。”相关的问题

第2题
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
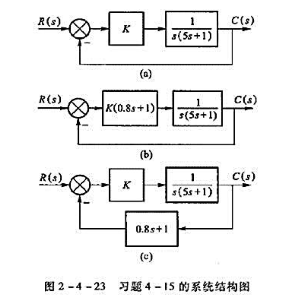
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
第3题
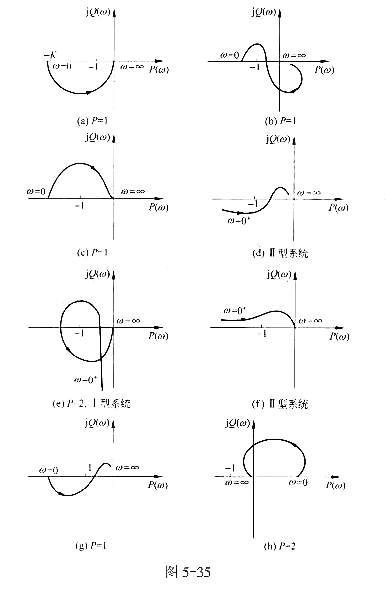
设系统的开环幅相频率特性如图5-35所示,写出开环传递函数的形式,并判断闭环系统是否稳定。图中
设系统的开环幅相频率特性如图5-35所示,写出开环传递函数的形式,并判断闭环系统是否稳定。图中P为开环传递函数在s右半平面的极点数。
第4题
反馈控制系统的开环传递函数为(1)画出系统开环幅相曲线的大致形状,并分别标出系统的稳定和不稳
反馈控制系统的开环传递函数为
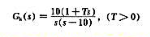
(1)画出系统开环幅相曲线的大致形状,并分别标出系统的稳定和不稳定时(-1, j0) 点的位置;
(2)由频率特性计算出闭环系统稳定时T的临界值。
第5题
从制动力阶跃变化时刻起,底盘测功机达到90%制动力的响应时间不大于()ms。A.300B.400C.500D.6800
从制动力阶跃变化时刻起,底盘测功机达到90%制动力的响应时间不大于()ms。
A.300
B.400
C.500
D.6800

第8题
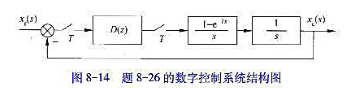
数字控制系统结构图如图8-14所示,采样周期T=1s。(1)试求未校正系统的闭环极点,并判断其稳定性。
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
第9题
系统的方程组如下试求保证系统稳定时,K的允许范围,并判断K取何范围能使系统阶跃过渡过程没有
系统的方程组如下
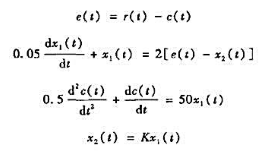
试求保证系统稳定时,K的允许范围,并判断K取何范围能使系统阶跃过渡过程没有超调量。
第10题
已知单位反馈系统I, II, II均为最小相位系统,其开环对数幅频特性的渐近线分别在图5-7中给出,试
已知单位反馈系统I, II, II均为最小相位系统,其开环对数幅频特性的渐近线分别在图5-7中给出,
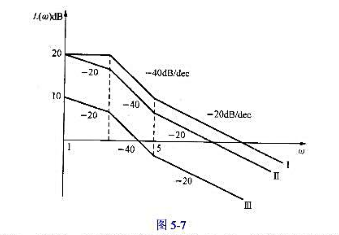
试完成:
(1)求出各系统分别对单位阶跃输入和单位斜坡输入时的稳态误差;
(2)分析比较系统II和系统对于阶跃输入的超调量。
第11题
当一个或多个设防区域产生报警时,分线制入侵报警系统的响应时间不大于()s。A.1B.2C.3D.4
当一个或多个设防区域产生报警时,分线制入侵报警系统的响应时间不大于()s。
A.1
B.2
C.3
D.4















