题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
旋动螺旋构件时滑块移动就获得需要的开口量,有使用范围,使用便利的工具是()。A.测力扳手B.活动扳
旋动螺旋构件时滑块移动就获得需要的开口量,有使用范围,使用便利的工具是()。
A.测力扳手
B.活动扳手
C.梅花扳手
D.棘轮扳手
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
旋动螺旋构件时滑块移动就获得需要的开口量,有使用范围,使用便利的工具是()。
A.测力扳手
B.活动扳手
C.梅花扳手
D.棘轮扳手
如果结果不匹配,请 联系老师 获取答案
 更多“旋动螺旋构件时滑块移动就获得需要的开口量,有使用范围,使用便…”相关的问题
更多“旋动螺旋构件时滑块移动就获得需要的开口量,有使用范围,使用便…”相关的问题
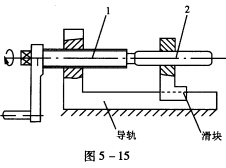
如图5—15所示:滑块由差动螺旋带动在导轨上移动。螺纹1为M12×1,螺纹2为M10×0.75,螺纹1为右旋,(1)手柄按图示方向(从左向右看为顺耐针)转1圈时。滑块移动距离为多少?(2)若螺纹2螺旋方向改变。手柄按图示方向(从左向右看为顺时针)转1圈时。滑块移动距离为多少?[中科院2006研]
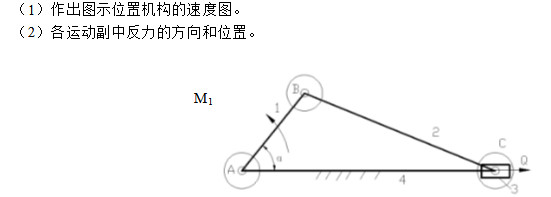
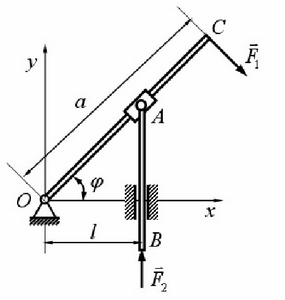
在图示机构中,当曲柄OC绕轴O摆动时,滑块A沿曲柄滑动,从而带动杆AD在铅直导槽内移动,不计各;构件自重与各处摩擦。已知OC=a,OK=l,在点C处垂直于曲柄的作用力F1,而点B沿BA作用力F2,求机构平衡时力F1与F2的关系。
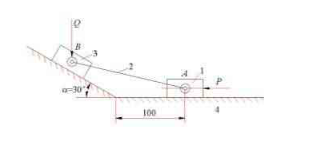
在图示双滑块机构中,滑块1在驱动力P作用下等速运动。设已知各转动副中轴颈半径r=10mm,当量摩擦因数fv=0.1,移动副中的滑动摩擦因数f=0.176327,lAB=200mm。各构件的重量略而不计。当P=500N时,试求所能克服的生产阻力Q以及该机构在此瞬时位置的效率。