

 如果结果不匹配,请
如果结果不匹配,请 
 更多“匹配滤波器使用的最佳接收准则是最小均方误差准则。()”相关的问题
更多“匹配滤波器使用的最佳接收准则是最小均方误差准则。()”相关的问题
第1题
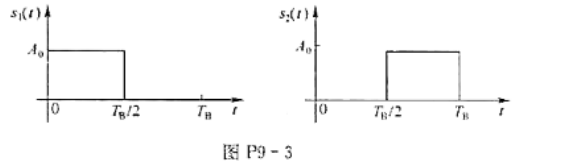
设接收机输入端的二进制信号码元s1(t)和s2(t)的波形如图P9-3所示.输入高斯白噪声的双
设接收机输入端的二进制信号码元s1(t)和s2(t)的波形如图P9-3所示.输入高斯白噪声的双
点击查看答案
边功率谱密度为no/2(W/Hz)。
(1)画出匹配滤波器形式的最佳接收机结构;
(2)确定匹配滤波器的单位冲激响应和a及b点的波形;
(3)求此系统的误码率。
第2题
关于线性最小均方估计,下列叙述正确的是:()。
A.线性最小均方估计是无偏估计
B.线性最小均方估计也是最小方差无偏估计
C.任何情况下,线性最小均方等价于最大后验概率估计
D.当观测与被估计量是联合正态分布时,线性最小均方估计等价于最小均方估计
第3题
是否增加地区仓储的最佳准则是()。
A.如果增加新地区仓储所节约的运费与所能增加的顾客惠顾利益二者之和大于建立仓储所增加的成本,就应在这一地区增设仓储
B.如果增加新地区仓储所节约的运费与顾客惠顾的利益二者之和大于建立仓储所增加的成本,就应在这一地区增设仓储
C.如果新地区的运费与所能增加的顾客惠顾利益二者之和大于建立仓储所增加的成本,就应在这一地区增设仓储
D.以上准则均不正确
第4题
关于卡尔曼滤波算法,下列说法正确的是()。
A.卡尔曼滤波是一组线性最小均方估计的递推算法
B.卡尔曼滤波能够提供离散时间线性系统状态的线性最小均方估计
C.卡尔曼滤波在应用时需要对随机动态线性系统建立模型
D.在卡尔曼滤波算法推导中,系统扰动噪声和测量噪声都是假定为白噪声
第5题
用二次方程at2+bt+c来近似表示函数e',区间在(-1,1),使方均误差最小,求系数a,b和c.
用二次方程at2+bt+c来近似表示函数e',区间在(-1,1),使方均误差最小,求系数a,b和c.
点击查看答案
第6题
在估计的基本方法中,下列说法哪些是正确的。()
A.最大似然估计是使似然函数最大的那个参数作为估计
B.条件中位数估计为先验概率密度的中位数作为估计
C.最小均方估计等于被估计量的条件均值
D.观测数据的获得可以减少待估计参数的不确定性
第10题
对音频信号进行线性预测分析的基本思想是:一个音频信号的采样能够用过去若干音频信号采样的线性组合来逼近,通过是线性预测到的采样在最小均方误差意义上逼近实际音频信号采样,可以求取一组唯一的预测系数。()此题为判断题(对,错)。















