题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
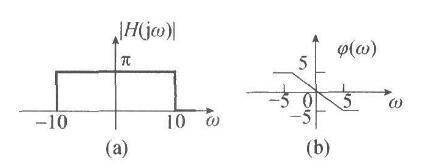
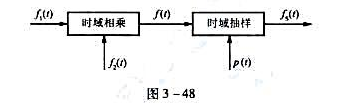
系统如图3-48所示,(1)为从fs(t)无失真恢复f(t),求最大抽样间隔;(2)当时,画出fs(t)的幅度谱.
系统如图3-48所示,(1)为从fs(t)无失真恢复f(t),求最大抽样间隔;(2)当时,画出fs(t)的幅度谱.
系统如图3-48所示,

(1)为从fs(t)无失真恢复f(t),求最大抽样间隔 ;
;
(2)当 时,画出fs(t)的幅度谱
时,画出fs(t)的幅度谱 .
.
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“系统如图3-48所示,(1)为从fs(t)无失真恢复f(t)…”相关的问题
更多“系统如图3-48所示,(1)为从fs(t)无失真恢复f(t)…”相关的问题
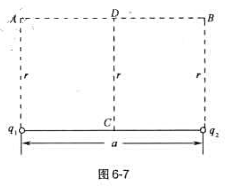
 时的a值。
时的a值。