

 如果结果不匹配,请
如果结果不匹配,请 
 更多“K、N、R值的定义及其产生的意义?分店R值的作业流程?”相关的问题
更多“K、N、R值的定义及其产生的意义?分店R值的作业流程?”相关的问题
第1题
已知r(n)是N点的有限长序列,X(k)=DFT[r(n)].现将x(n)的每两点之间补进r-1个零值点,得到一个r≇
已知r(n)是N点的有限长序列,X(k)=DFT[r(n)].现将x(n)的每两点之间补进r-1个零值点,得到一个r≇
点击查看答案
已知r(n)是N点的有限长序列,X(k)=DFT[r(n)].现将x(n)的每两点之间补进r-1个零值点,得到一个rN点的有限长序列

试求rN点DFT[y(n)]与X(k)的关系。
第2题
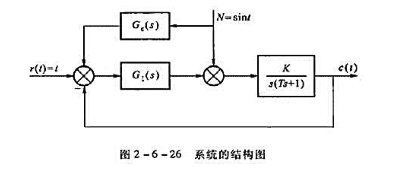
系统的结构图如图2-6-26 所示。图中K>0,T>0,误差的定义为R-C。①设计G1</sub>(s)、Gc</sub>(s)使系统
系统的结构图如图2-6-26 所示。图中K>0,T>0,误差的定义为R-C。
①设计G1(s)、Gc(s)使系统在干扰N和控制输入r同时作用下无稳态误差。
②若不采用图中的干扰补偿方案,而改为只用G1(s)来消除干扰N和r同时作用下的稳态误差,问G1(s)应如何设计,说明G1(s)结构和参数应满足的条件。
第5题
整数集I上的一元运算定义如下:(m)=m'(modk)其中r,k为给定正整数,又定义I上的关系~:X~y当且
整数集I上的一元运算 定义如下:
定义如下:
(m)=m'(modk)
其中r,k为给定正整数,又定义I上的关系~:
X~y当且仅当x=y(modk)
问一是否是代数结构<l,>上的同余关系.
第6题
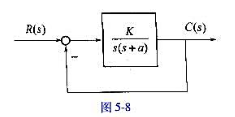
系统如图所示,K>0, 输入r(t)=Acos3t 时,从示波器中观测到输入,输出的幅值相等,相位差90°。(1)确
系统如图所示,K>0, 输入r(t)=Acos3t 时,从示波器中观测到输入,输出的幅值相等,相位差90°。
(1)确定参数a,K;
(2)若输入r(t)=3cosωt.确定ω为何值时,稳态输出c(t)的幅值最大,并求出此最大幅值。
第10题
列表对比下列的定义及其否定叙述:1)f(x)在R是偶函数与不是偶函数;2)f(.x)在R是周期函数与不是周期函数;3)f(x)在(a,b)是严格增加函数与不是严格增加函数;4)f(x)在(a,b)是单调减少函数与不是单调减少兩数.
列表对比下列的定义及其否定叙述:1)f(x)在R是偶函数与不是偶函数;2)f(.x)在R是周期函数与不是周期函数;3)f(x)在(a,b)是严格增加函数与不是严格增加函数;4)f(x)在(a,b)是单调减少函数与不是单调减少兩数.
点击查看答案
第11题
设A,B是n阶矩阵,k≠0,则以下选项中正确的是( )。
设A,B是n阶矩阵,k≠0,则以下选项中正确的是()。
点击查看答案
A.|A+B|=|A|+|B|
B.|kA|=k|A|
C.r(A+B)=r(A)+r(B)
D.r(kA)=r(A)















