 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
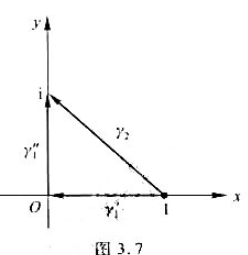
已知f(z)=z2,计算其中γ1沿实轴从1到0,再沿虚轴由0到i;γ2:沿x+y=1从1到i(图3.7).
已知f(z)=z2,计算

其中γ1沿实轴从1到0,再沿虚轴由0到i;γ2:沿x+y=1从1到i(图3.7).
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知f(z)=z2,计算
其中γ1沿实轴从1到0,再沿虚轴由0到i;γ2:沿x+y=1从1到i(图3.7).
如果结果不匹配,请 联系老师 获取答案
 更多“已知f(z)=z2,计算其中γ1沿实轴从1到0,再沿虚轴由0…”相关的问题
更多“已知f(z)=z2,计算其中γ1沿实轴从1到0,再沿虚轴由0…”相关的问题
说出下列方程所表示的曲面的名称并作出它们的简单图形。
(1)x2+2y2=1;
(2)x2-2y2=1;
(3)x2+2y2=z;
(4)x2-2y2=z;
(5)x2+2y2=z2;
(6)x2-2y2=z2;
(7)x2+2y2=z2+1;
(8)x2-2y2=z2+1;
(9)x2+2y2=1-z2;
(10)x2-2y2=1-z2。
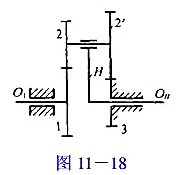
图11-18所示行星轮系中,如轮1轴上的输入功率为P1=7355W,且其转速为n1=700r/min;各轮齿数为z1=z2´=40,z2=z3=30;每对齿轮的效率为η=0.9.试问从动轴OH输出的力矩有多大?
计算曲线积分 ,其中
,其中
(I)L是曲线 方向是从0z轴正方向往负方向看去为顺时针方向;
方向是从0z轴正方向往负方向看去为顺时针方向;
(II)L是自点A(1,0,0)经过点B(0,2,0)和点C(0,0,3),又回到点A的三角形围线.
【问题1】在SDH光传送网中,数据信号将依次进入多级基本单元,这些基本单元按照速率从低到高依次为:容器、(1) 、(2) 、支路单元组、管理单元、(3) 、(4) ;其中,(5)在SDH网络中始终保持完整不变,能够独立地在通道的任意一点进行插入、分出和交叉连接。 多业务传输平台(MSTP)是在SDH基础上发展而来,而通用成帧规程(GFP)是其中很重要的封装技术之一。GFP的最大特点是有两种映射方式,使用(6)映射方式可高效地封装分组型业务,使用(7)映射方式可支持固定比特率业务, 【问题2】
(1)自动交换光网络(ASON)能够在ASON信令网控制下完成光传送网内的光网络连接以及自动交换。()
(2)ASON定义了三种连接类型,其中最为灵活的是交换连接。交换连接的灵活性得益于新型管理平面对通信终端系统请求的快速响应。()
(3)光时域反射仪(OTDR)通过测量沿光纤返回的反向光功率可以获得入射光沿光纤传输路径的损耗特性。()
(4)弹性分组环(RPR)技术是一种基于以太网或者SDH的分组交换机制;它将路由选择和数据转发分开,且通常只在网络边缘分析IP包头,提高了交换处理能力,改善了网络能。()
【问题3】
已知某单模光纤的工作波长为1550nm,传输长度为30km,光发送机的输出光功率为0dBm,其传输损耗为0.2dB/km,仅考虑光纤传输损耗的情况下,光接收机的接收光功率是多少?
设函数f(x,y,z)在区域 内连续.若对于Ω内任意有界子域w,都有
内连续.若对于Ω内任意有界子域w,都有

证明f(x,y,z)=0,其中 .
.
有一对标准渐开线直齿圆柱齿轮传动,己知重合度 (式中a'为啮合角),a=20,m=3mm,
(式中a'为啮合角),a=20,m=3mm,
a*=1,c*=0.25,z1=30,z2=50,试计算:(1)齿轮1的分度圆半径和齿厚;(2)按标准中心距安装时此传动的实际啮合线长度L;现在根据运动要求,将轮2的齿数z2变更为z2´=51,而中心距保持不变,仍然利用齿轮1且保证两轮作无侧隙啮合,啮合方程式inva'=2tan (x1+x2)/(z1+z2)+inva,(3)试计算啮合角a';(4)判断轮2应作何种变位.
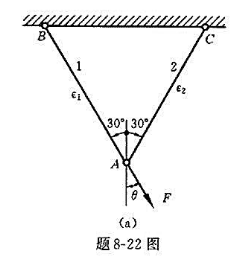
题8-22图(a)所示桁架,杆1与杆2的横截面面积与材料均相同,在节点A处承受载荷F作用。从试验中测得杆1与杆2的纵向正应变分别为ε1=4.0×10-4与ε2=-2.0×10-4,试确定载荷F及其方位角θ之值。已知:A1=A2=200mm2,E1=E2=200GPa。
已知非线性系统的数学模型为
(1)当初始条件为 时,绘制相轨迹;(注:在相平面上标出各段相轨迹的起点和终点坐标);
时,绘制相轨迹;(注:在相平面上标出各段相轨迹的起点和终点坐标);
(2)分析系统的稳定性;
(3)若系统稳定,计算从初态达到平衡状态所需的时间。
















