题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
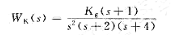
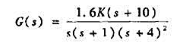
设单位负反馈系统的开环传递函数分别为试确定使闭环系统稳定的开环增益K的取值范围。
设单位负反馈系统的开环传递函数分别为

试确定使闭环系统稳定的开环增益K的取值范围。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
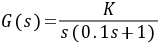
设单位负反馈系统的开环传递函数分别为
试确定使闭环系统稳定的开环增益K的取值范围。
如果结果不匹配,请 联系老师 获取答案
 更多“设单位负反馈系统的开环传递函数分别为试确定使闭环系统稳定的开…”相关的问题
更多“设单位负反馈系统的开环传递函数分别为试确定使闭环系统稳定的开…”相关的问题
已知单位负反馈系统的开环传递函数为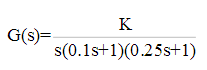 ,试应用劳斯判据确定使系统稳定时开环放大系数K的取值范围。
,试应用劳斯判据确定使系统稳定时开环放大系数K的取值范围。
已知单位负反馈系统的开环传递函数为:
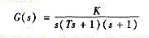
其中K>0、T>0。试确定使闭环系统稳定时,参数K、T应满足的关系:并计算在输入r(t)=tX1(t)作用下系统的稳态误差。
设单位负反馈控制系统的开环传递函数为
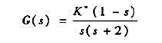
试绘制K*从0→∞的闭环根轨迹图,并求出使系统产生重根和纯虚根的K*值。
已知单位负反馈系统的开环传递函数为

试用根轨迹法确定使闭环主导极点的阻尼比ξ=0.5和自然振荡角频率ωn=2时的Kg值。
单位负反馈控制系统的开环传递函数

输入信号为r(t)=(a+bt)·1(t)(a,b为常数)。试求系统稳态误差enn≤ε时各参数应保持的关系(e=r-c)。
单位负反馈系统的开环传递函数为
单位负反馈系统的开环传递函数为

试计算下列参数:超调量σ%、调节时间te、峰值时阀tp,截止频率ωe、谐振峰值Mm、谐振频率ωm、频带ωb、相稳定裕度γ、模稳定裕度h。







 ,要求设计串联控制器,使:
,要求设计串联控制器,使: 时的稳态误差≤0.005;
时的稳态误差≤0.005; ;
; 。
。