题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
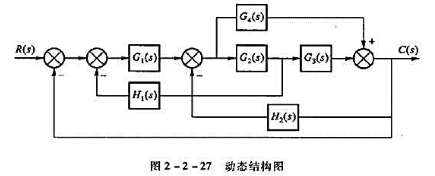
某系统动态结构图如图2-2-27所示,求传递函数C(s)/R(s)。
某系统动态结构图如图2-2-27所示,求传递函数C(s)/R(s)。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“某系统动态结构图如图2-2-27所示,求传递函数C(s)/R…”相关的问题
更多“某系统动态结构图如图2-2-27所示,求传递函数C(s)/R…”相关的问题
某系统结构图如图2-9-7所示
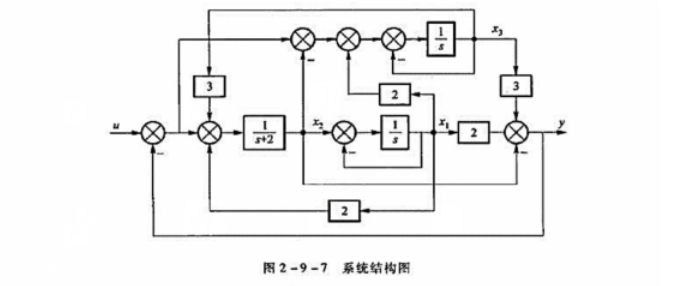
①据图2-9-7所给出的系统状态变量x1、x2、x3,求该系统的动态方程(状态方程和输出方程)。
②根据①所求出的动态方程,判断系统的可控性和可观测性。
③求该系统的矩阵指数eAi。
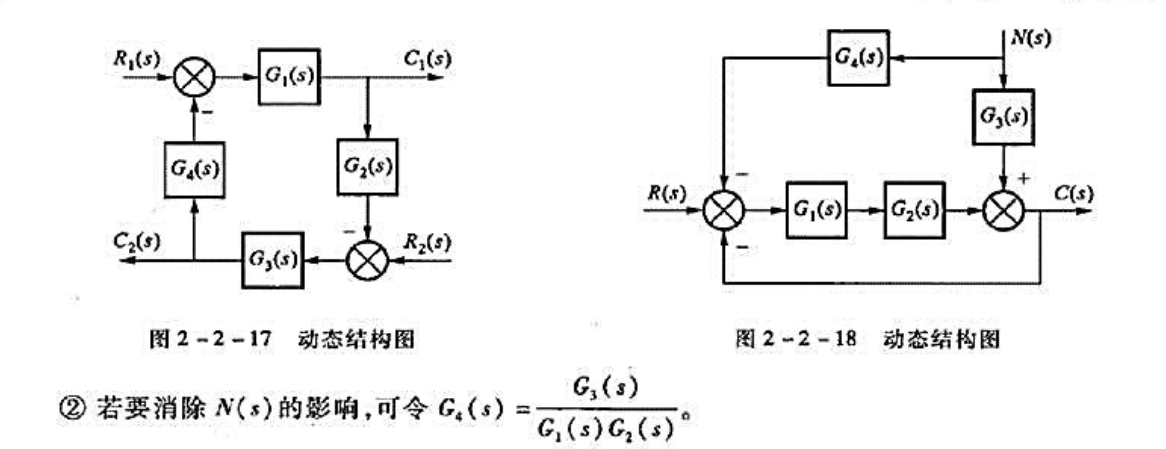
已知系统结构图如图2-2-17所示,求传递函数C1(s)/R1(s)、C2(s)/R2(s)、
C1(s)/R2(s)和C2(s)/R1(s)。
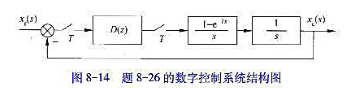
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
某因果数字滤波器的零、极点如图10-25(a)所示,并已知其 .试求:
.试求:
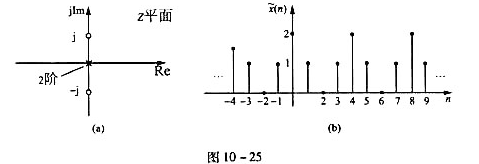
(1)它的系统函数H(z)及其收敛域,且回答它是IIR还是FIR的什么类型(低通、高通、带通、带阻或全通)滤波器?
(2)写出图10-25(b)所示周期信号 的表达式,并求其离散傅里叶级数的系数;
的表达式,并求其离散傅里叶级数的系数;
(3)该滤波器对周期输入的响应y[n].
已知系统结构图如图4-10所示。
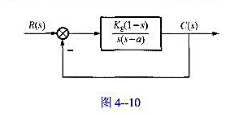
(1)当a=3时,画出Kg从0变化到+∞时的根轨迹,确定系统无超调时Kg的取值范围及系统的临界稳定时的Kg值;
(2)当Kg=3时,画出a从0变化到+∞时的根轨迹,确定系统 时的a值。
时的a值。
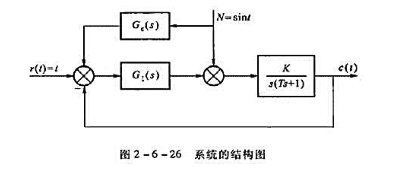
系统的结构图如图2-6-26 所示。图中K>0,T>0,误差的定义为R-C。
①设计G1(s)、Gc(s)使系统在干扰N和控制输入r同时作用下无稳态误差。
②若不采用图中的干扰补偿方案,而改为只用G1(s)来消除干扰N和r同时作用下的稳态误差,问G1(s)应如何设计,说明G1(s)结构和参数应满足的条件。
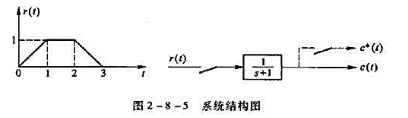
系统结构如图2-8-5所示,采样周期T=0.5s,求c(nT),n=0,1,2,3,4,5 。
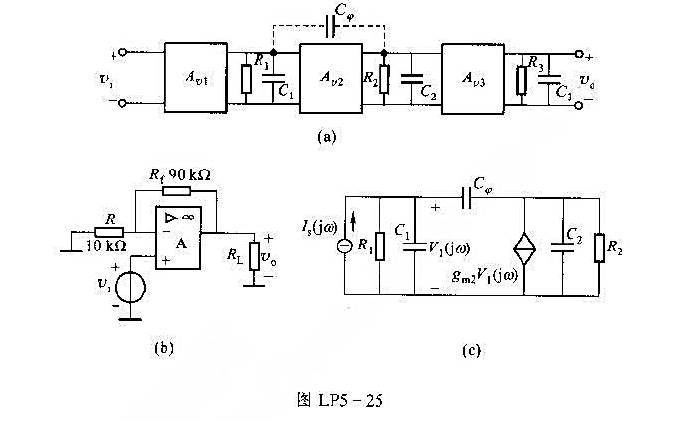
定,已知 若把它接成图LP5-25(b)所示的同相放大电路,为保证反馈放大器稳定工作,可采用简单电容补偿,亦可采用如图LP5-25(c)所示的密勒电容补偿,图中gm= 试求两种补偿时所需的电容值.设密勒补偿时
试求两种补偿时所需的电容值.设密勒补偿时 各级的输入和输出电阻对电路影响忽略不计.
各级的输入和输出电阻对电路影响忽略不计.