如果结果不匹配,请
如果结果不匹配,请 
 更多“工业机器人的手部也称(),是连接在J6轴的末端法兰上的工具。”相关的问题
更多“工业机器人的手部也称(),是连接在J6轴的末端法兰上的工具。”相关的问题
第5题
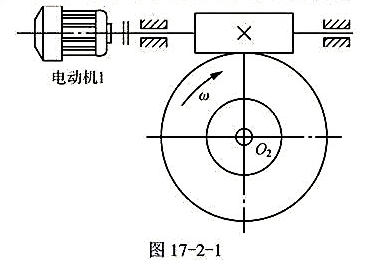
如图17-2-1所示,有两只转速相同的电动机,电动机1连接在蜗杆轴上,电动机2直接连接在O2轴上(垂直
如图17-2-1所示,有两只转速相同的电动机,电动机1连接在蜗杆轴上,电动机2直接连接在O2轴上(垂直于图纸平面,图中未标出),O2轴的另一端连接工作机。这样,当起动电动机1(停止电动机2)时,电动机1经蜗杆蜗轮减速后驱动O2轴,是慢速挡。若起动电动机2(停止电动机1)直接驱动O2轴,则是快速挡。要求电动机1,电动机2可以同时起动,或电动机2起动后再停止电动机1(反之亦然)时,不会产生卡死现象。试选一种离合器,使之实现上述要求(要求用示意图配合文字说明其动作)。