

 如果结果不匹配,请
如果结果不匹配,请 
 更多“闭环控制系统的类型有哪些?”相关的问题
更多“闭环控制系统的类型有哪些?”相关的问题
第3题
闭环控制系统是指控制器与被控对象之间既有顺向控制,又有()的自动控制系统。A.反向联系B.直接联
闭环控制系统是指控制器与被控对象之间既有顺向控制,又有()的自动控制系统。
A.反向联系
B.直接联系
C.操纵变量
第6题
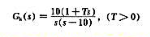
设单位反馈控制系统的开环传递函数为若要求其闭环主导极点的阻尼角为60°,试用根轨迹法确定该系统
设单位反馈控制系统的开环传递函数为

若要求其闭环主导极点的阻尼角为60°,试用根轨迹法确定该系统的动态性能指标Mp、tp、tk和稳态性能指标Ky。
第7题
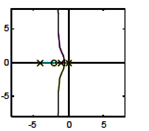
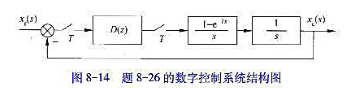
数字控制系统结构图如图8-14所示,采样周期T=1s。(1)试求未校正系统的闭环极点,并判断其稳定性。
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
第9题
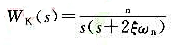
反馈控制系统的开环传递函数为(1)画出系统开环幅相曲线的大致形状,并分别标出系统的稳定和不稳
反馈控制系统的开环传递函数为
(1)画出系统开环幅相曲线的大致形状,并分别标出系统的稳定和不稳定时(-1, j0) 点的位置;
(2)由频率特性计算出闭环系统稳定时T的临界值。
第10题
一单位反馈控制系统的开环传递函数为已知系统的x(t)=1(t),误差时间函数为e(t)=1.4e1.07t⊕
一单位反馈控制系统的开环传递函数为
已知系统的x(t)=1(t),误差时间函数为e(t)=1.4e1.07t-0.4-3.73,求系统的阻尼比ζ、自然振荡角频ω0率 、系统的开环传递函数和闭环传递函数、系统的稳态误差。















