题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
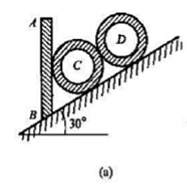
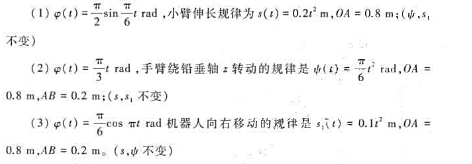
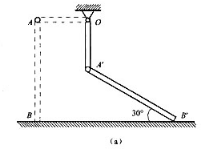
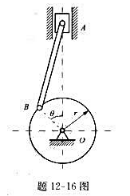
如图a所示机器人的手臂2在铅垂面内的转角用φ(t)表示。设ι=1s时,机器人手臂2在铅垂面内的位置如图
如图a所示机器人的手臂2在铅垂面内的转角用φ(t)表示。设ι=1s时,机器人手臂2在铅垂面内的位置如图
所示。试分别在下列各种条件下求手腕处点B的绝对速度和绝对加速度。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
所示。试分别在下列各种条件下求手腕处点B的绝对速度和绝对加速度。
如果结果不匹配,请 联系老师 获取答案
 更多“如图a所示机器人的手臂2在铅垂面内的转角用φ(t)表示。设ι…”相关的问题
更多“如图a所示机器人的手臂2在铅垂面内的转角用φ(t)表示。设ι…”相关的问题
质量为m,长为2l的均质杆OA绕水平固定轴O在铅垂面内转动,如题9-12图(a)所示。已知在图示位置杆的角速度为角加速度为a。试求此时杆在O轴的约束力。

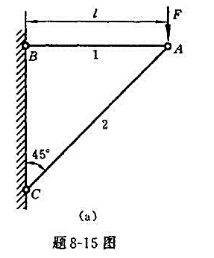
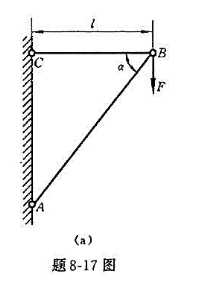
题8-15图(a)所示桁架,杆1为圆截面钢杆,杆2为方截面木杆,在节点A处承受铅垂方向的载荷F作用,试确定钢杆的直径d与木杆截面的边宽b.已知载荷F=50kN,钢的许用应力[σs]=160MPa,木的许用应力[σw]=10MPa。

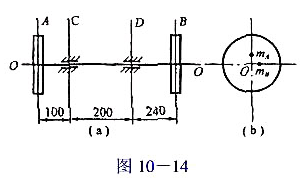
 .它们偏心方向线夹角如图(b)所示为90°.该轴由C和D两轴承支承,相对距离如图(单位:mm).今若允许在某一回转面E内回转半径为10mm处加一平衡质量,使整个回转件达到静平衡,且今轴承D所受的动反力最小.试求:
.它们偏心方向线夹角如图(b)所示为90°.该轴由C和D两轴承支承,相对距离如图(单位:mm).今若允许在某一回转面E内回转半径为10mm处加一平衡质量,使整个回转件达到静平衡,且今轴承D所受的动反力最小.试求:(1)平面E中所加平衡质量mE的大小和其偏心方向线相对A的偏心方向间的夹角 EA;
EA;
(2)平面E相对圆盘A的轴向距离dAE;
(3)当转轴转速为3000r/min时,试比较加平衡质量前、后轴承D所受动反力的大小.并指出消除此动反力的办法.
题8-17图(a)所示桁架,承受铅垂载荷F作用。已知杆的许用应力为[σ],试问在节点B与C的位置保持不变的条件下,欲使结构重量最轻,a应取何值(即确定节点A的最佳位置)。
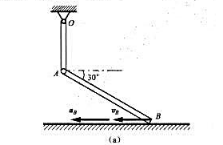
题7-24图(a)所示平面机构中,OA=12cm, AB=30cm,AB杆的B端以vB=2m/s, aB=1m/s'向左沿固定平面运动。在图示位置,OA处于铅垂位置,试求该瞬时,AB杆的角速度和角加速度。
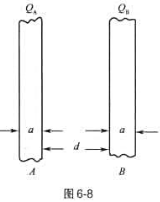
如图6-8所示,真空中两块面积很大(可视为无限大)的导体平板A、B平行放置,间距为d,每板的厚度为a,板面积为S。现给A板带电QA,B板带电QB。(1)分别求出两板表面上的电荷面密度;(2)求两板之间的电势差。
水箱液面高度控制系统的三种原理方案如图2-1-1所示。在运行中,希望液面高度H维持不变。
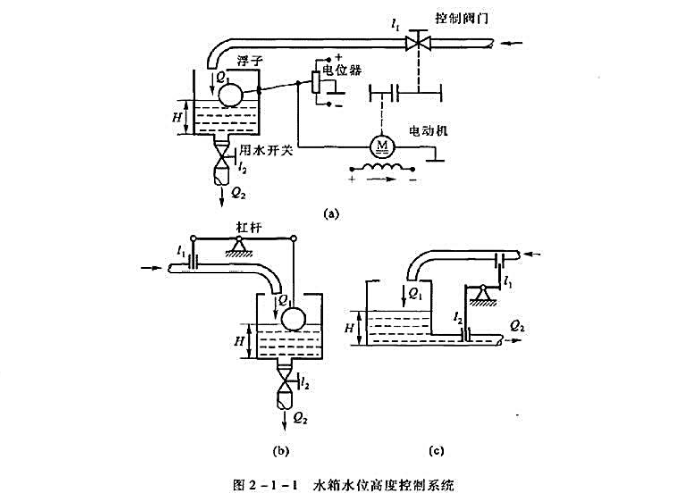
①试说明各系统的工作原理。
②画出各系统的方框图,并指出被控对象、被控量、给定值、干扰量是什么?
③试说明各系统属于哪种控制方式。