

 如果结果不匹配,请
如果结果不匹配,请 
 更多“闭环系统的根轨迹增益和开环系统的前向通路根轨迹增益是一致的。…”相关的问题
更多“闭环系统的根轨迹增益和开环系统的前向通路根轨迹增益是一致的。…”相关的问题
第2题
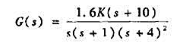
设单位负反馈控制系统的开环传递函数为试绘制K*从0→∞的闭环根轨迹图,并求出使系统产生重根和
设单位负反馈控制系统的开环传递函数为
试绘制K*从0→∞的闭环根轨迹图,并求出使系统产生重根和纯虚根的K*值。
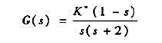
 ,试作K由零变化到正无穷时,闭环系统的根轨迹图。
,试作K由零变化到正无穷时,闭环系统的根轨迹图。第4题
已知单位负反馈系统的开环传递函数为试用根轨迹法确定使闭环主导极点的阻尼比ξ=0.5和自然振荡
已知单位负反馈系统的开环传递函数为

试用根轨迹法确定使闭环主导极点的阻尼比ξ=0.5和自然振荡角频率ωn=2时的Kg值。
第5题
设单位反馈控制系统的开环传递函数为若要求其闭环主导极点的阻尼角为60°,试用根轨迹法确定该系统
设单位反馈控制系统的开环传递函数为

若要求其闭环主导极点的阻尼角为60°,试用根轨迹法确定该系统的动态性能指标Mp、tp、tk和稳态性能指标Ky。
第6题
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
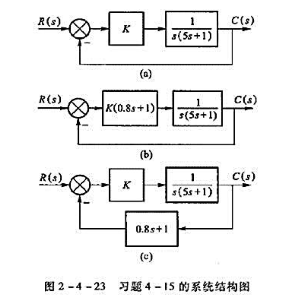
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。

第9题
已知一单位负反馈系统的开环传递函数为(1)作系统的根轨迹图,并确定临界阻尼时的Kg值。(2)
已知一单位负反馈系统的开环传递函数为

(1)作系统的根轨迹图,并确定临界阻尼时的Kg值。
(2)求系统稳定的Kg值范围。
第10题
(1)若离散时间信号反馈系统的开环系统函数表达式为其中极点(1)在z平面画根轨迹图;(2)求为保证
(1)若离散时间信号反馈系统的开环系统函数表达式为其中极点(1)在z平面画根轨迹图;(2)求为保证
点击查看答案
(1)若离散时间信号反馈系统的开环系统函数表达式为
其中极点 (1)在z平面画根轨迹图;
(1)在z平面画根轨迹图;
(2)求为保证系统稳定的K值范围.
第11题
已知单位负反馈系统的开环传递函数为(1)绘制Kg由0→∞变化时的根轨迹。(2)求产生重根和纯虚
已知单位负反馈系统的开环传递函数为
(1)绘制Kg由0→∞变化时的根轨迹。
(2)求产生重根和纯虚根时的Kg值。















