 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
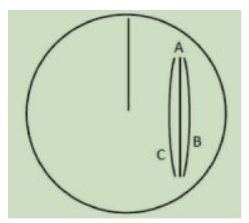 如图所示,在船上,确定雷达的测距误差,观测近距离(0.25nmile之内)一平直岸线A,如果回波呈弧线B,说明雷达测量的距离()。
如图所示,在船上,确定雷达的测距误差,观测近距离(0.25nmile之内)一平直岸线A,如果回波呈弧线B,说明雷达测量的距离()。
A.不确定
B.等于实际距离
C.大于实际距离
D.小于实际距离
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如图所示,在船上,确定雷达的测距误差,观测近距离(0.25nmile之内)一平直岸线A,如果回波呈弧线B,说明雷达测量的距离()。
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如图所示,在船上,确定雷达的测距误差,观测近距离(0.25nmile之内)一平直岸线A,如果回波呈弧线B,说明雷达测量的距离()。A.不确定
B.等于实际距离
C.大于实际距离
D.小于实际距离
如果结果不匹配,请 联系老师 获取答案
 更多“如图所示,在船上,确定雷达的测距误差,观测近距离(0.25n…”相关的问题
更多“如图所示,在船上,确定雷达的测距误差,观测近距离(0.25n…”相关的问题
如图所示,在船上,确定雷达的测距误差,观测近距离(0.25nmile之内)一平直岸线A,如果回波呈弧线B,说明雷达测量的距离()。
A.不确定
B.等于实际距离
C.大于实际距离
D.小于实际距离
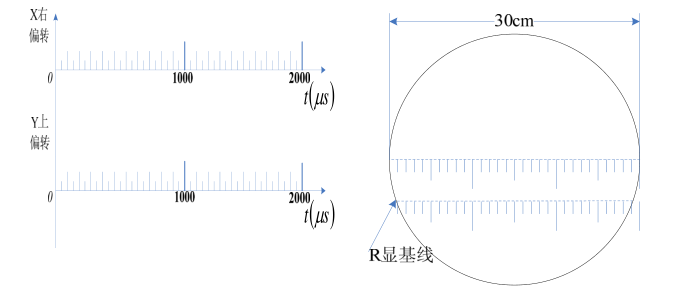
(1)计算该雷达的最大满量程测距范围Rmax和A显的最大X偏转电压Vxmax。
(2)计算该雷达R显的扫略线长度IR和对应的X偏转电压变化量△VxR。
(3)若该示波管X左偏转板接地,试画出加于X右偏转板、Y上偏转板的偏转信号,标明电压、时间关系,图形画在给定的坐标上。
(4)若雷达探测到52.5Km处有一目标,试画出此时A/R显示器的显示画面,并标明时间或扫掠线长度关系,图形画在给定的坐标上。
在使用______旋钮时,会降低雷达增益。(1)雨雪抑制 (2)海浪抑制 (3)聚焦 (4)活动测距 (5)扫描中心调整
A.(1)~(5)
B.(1)~(4)
C.(1)~(3)
D.(3)~(5)
A.热像仪可以在黑夜之中使用
B.声呐主要用于在陆地上及空中探测距离
C.雷达测距利用了无线电波沿直线传播的原理
D.地下金属探测仪器利用了电磁感应原理
A.视频摄像头,用来判断交通信号灯以及任何移动的物体
B.激光雷达,三维立体扫描来“感知”周围世界,形成真实道路环境的3D地图。缺点是对现有车辆的外观质感有破坏性
C.测距雷达,传感器用来侦测和估算车辆的侧向位置偏移,以判断车辆在地图上的位置
D.位置传感器,测距雷达用于探测车辆周围的障碍物,一旦有物体接近,车辆将自动减速
















