如果结果不匹配,请
如果结果不匹配,请 
 更多“汽车横摆角速度频率特性上频率为零处时的幅值比,即稳态增益。(…”相关的问题
更多“汽车横摆角速度频率特性上频率为零处时的幅值比,即稳态增益。(…”相关的问题
第2题
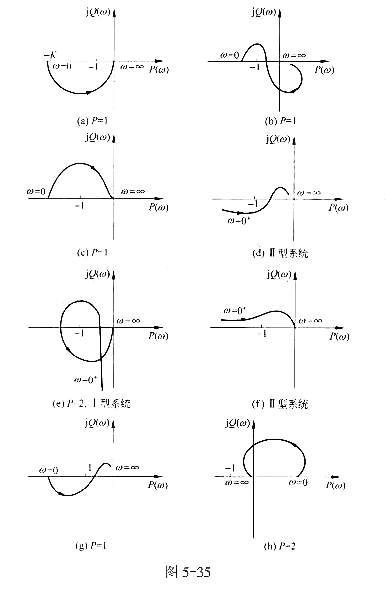
设系统的开环幅相频率特性如图5-35所示,写出开环传递函数的形式,并判断闭环系统是否稳定。图中
设系统的开环幅相频率特性如图5-35所示,写出开环传递函数的形式,并判断闭环系统是否稳定。图中P为开环传递函数在s右半平面的极点数。
第3题
反馈控制系统的开环传递函数为(1)画出系统开环幅相曲线的大致形状,并分别标出系统的稳定和不稳
反馈控制系统的开环传递函数为
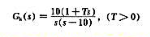
(1)画出系统开环幅相曲线的大致形状,并分别标出系统的稳定和不稳定时(-1, j0) 点的位置;
(2)由频率特性计算出闭环系统稳定时T的临界值。
第4题
一晶体三极管在时忽略不计,当频率f=5MHz时,β(jw)的幅值为20,试求该晶体三极管的
一晶体三极管在时忽略不计,当频率f=5MHz时,β(jw)的幅值为20,试求该晶体三极管的
点击查看答案
一晶体三极管在 时
时 忽略不计,
忽略不计, 当频率f=5MHz时,β(jw)的幅值为20,试求该晶体三极管的
当频率f=5MHz时,β(jw)的幅值为20,试求该晶体三极管的
第5题
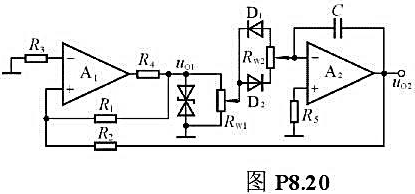
波形发生电路如图P8.20所示,设振荡周期为T,在一个周期内uo1=Uz的时间为T,则占空比为T
1/T;在电路某一参数变化时,其余参数不变.选择①增大、②不变或③减小填入空内:
点击查看答案
1增大时,uo1的占空比将()振荡频率将(),uo2的幅值将();若Rw1的滑动端向上移动,则uo1的占空比将(),振荡频率将(),uo2的幅值将();若Rw2的滑动端向上移动,则uo1的占空比将(),振荡频率将(),uo2的幅值将().
第6题
一定轴转动的刚体,在初瞬时的角速度ω0=20rad/s,刚体上一点的运动规律为s=t+t2(s的单
一定轴转动的刚体,在初瞬时的角速度ω0=20rad/s,刚体上一点的运动规律为s=t+t2(s的单位为m,t的单位为s)。求t=1s时刚体的角速度和角加速度,以及该点与转轴的距离。
第7题
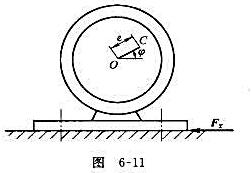
如图6-11所示,质量为m1的电动机,在转动轴上带动一质量为m2的偏小轮,偏心矩为e。如电动
机的角速度为ω,试求:
点击查看答案
1)如电动机外壳用螺杆扣在基础上,求作用在螺杆上最大的水平约束力Fx。
2)如不用螺杆固定,求角速度ω为多大时,电动机会跳离地面?
第9题
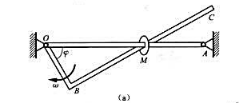
题6-10图(a)所示,直角曲杆OBC绕O轴转动,使套在其上的小环M沿固定直杆OA滑动。已知OB=0.1m, OB
题6-10图(a)所示,直角曲杆OBC绕O轴转动,使套在其上的小环M沿固定直杆OA滑动。已知OB=0.1m, OB
点击查看答案
与BC垂直,曲杆的角速度w=0.5rad/s,角加速度为零。求当φ=60°时,小环M的速度和加速度。
第10题
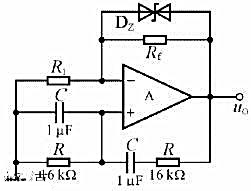
电路如图P8.7所示,稳压管起稳幅作用,其稳压值为±6V.试估算:(1)输出电压不失真情况下的有效值;(
电路如图P8.7所示,稳压管起稳幅作用,其稳压值为±6V.试估算:
(1)输出电压不失真情况下的有效值;
(2)振荡频率.