 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
()语句用来表示机器人由初始位置和姿态到目标位置和姿态的运动。
A.MOVE
B.WHILE
C.Offs
D.ProcCall
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.MOVE
B.WHILE
C.Offs
D.ProcCall
如果结果不匹配,请 联系老师 获取答案
 更多“()语句用来表示机器人由初始位置和姿态到目标位置和姿态的运动…”相关的问题
更多“()语句用来表示机器人由初始位置和姿态到目标位置和姿态的运动…”相关的问题
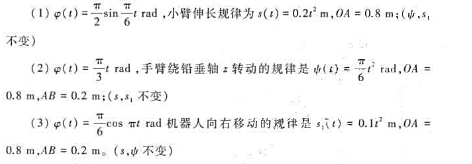
所示。试分别在下列各种条件下求手腕处点B的绝对速度和绝对加速度。
A. 向量大小代表正弦量的最大值
B. 向量初始位置代表正弦量的初相位
C. 向量旋转角速度代表角频率
D. 向量旋转时在纵轴上的投影代表正弦量的有效值
间的一条最短路径,假设从初始顶点到目标顶点之间存在路径。现有一种解决该问题的方法:
(1)设最短路径初始时仅包含初始顶点,令当前顶点u为初始顶点;
(2)选择离u最近且尚未在最短路径中的一个顶点v,加人到最短路径中,并修改当前结点u=v;
(3)重复步骤(2),直到u是目标顶点时为止。
请问上述方法能否求解最短路径?若该方法可行,请证明之;否则请举例说明。
















