 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知系统的动态方程为: (1)判断系统的渐近稳定性和BIBO稳定性。 (2)若可能,设计状态反馈使闭
已知系统的动态方程为:
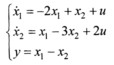 (1)判断系统的渐近稳定性和BIBO稳定性。 (2)若可能,设计状态反馈使闭环系统的极点位于-2±j2。 (3)当系统的状态不可直接量测时,若可能,设计极点均位于-6处的最小维状态观测器。
(1)判断系统的渐近稳定性和BIBO稳定性。 (2)若可能,设计状态反馈使闭环系统的极点位于-2±j2。 (3)当系统的状态不可直接量测时,若可能,设计极点均位于-6处的最小维状态观测器。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知系统的动态方程为:
(1)判断系统的渐近稳定性和BIBO稳定性。 (2)若可能,设计状态反馈使闭环系统的极点位于-2±j2。 (3)当系统的状态不可直接量测时,若可能,设计极点均位于-6处的最小维状态观测器。
如果结果不匹配,请 联系老师 获取答案
 更多“已知系统的动态方程为: (1)判断系统的渐近稳定性和BIBO…”相关的问题
更多“已知系统的动态方程为: (1)判断系统的渐近稳定性和BIBO…”相关的问题
试判断下列系统的稳定性: (1)已知离散系统的特征方程为:D(z)=(z+1)(z+0.5)(z+2)=0。 (2)已知闭环离散系统的特征方程为:D(z)=z4+0.2z3+z2+0.36z+0.8=0(注:要求用朱利判据)。 (3)已知误差采样的单位反馈离散系统,采样周期T=1s,开环传递函数:
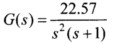
已知系统的开环传递函数为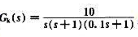 试完成:
试完成:
(1)判断闭环系统的稳定性;
(2)若实施中联校正,校正装置为 ,计算校正后的穿越频率ωc和相角裕量γ;
,计算校正后的穿越频率ωc和相角裕量γ;
(3)该校正装置是超前还是滞后网络?对系统动态性能指标有何改善?
(4)该校正装置对系统的静态性能有无影响?为什么?
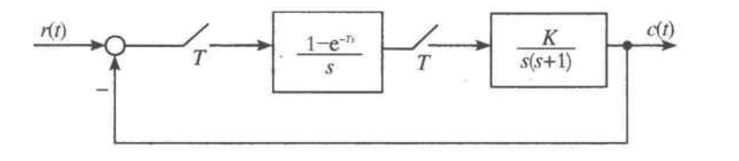
已知采样系统如图7-16所示,其中T=1s,K=1,
试求:
(1)闭环脉冲传递函数。
(2)判断系统是否稳定。
(3)写出描述系统教学模型的差分方程。
已知系统特征方程为
3s4+10s3+5s2+s+2=0
试用劳斯稳定判据判断确定系统的稳定性。
已知系统特征方程为 ,判断该系统的稳定性,若闭环系统不稳定,指出在平面右半部的极点个数。(要有劳斯计算表)
,判断该系统的稳定性,若闭环系统不稳定,指出在平面右半部的极点个数。(要有劳斯计算表)
已知下列负反馈系统的开环传递函数(参数 ),及其幅相曲线(图4),
),及其幅相曲线(图4), 判断各闭环系统的稳定性。(要说明理由)(a)
判断各闭环系统的稳定性。(要说明理由)(a) ;(b)
;(b) 。
。
设系统微分方程为
式中,u为输入量;x为输出量。
(1)设状态变量x1=x,
(2)设状态变换
已知离散系统的差分方程为y(n+2)-3y(n+1)+2y(n)=x(n+1)-2x(n),x(n)=2nu(u),yzi(0)=0,yzi(1)=1,求系统的零输入响应,零状态响应及完全响应。
某系统结构图如图2-9-7所示
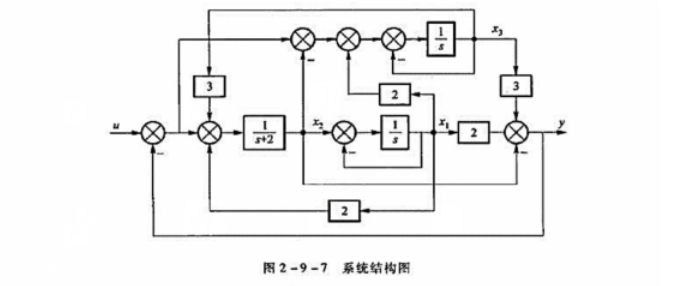
①据图2-9-7所给出的系统状态变量x1、x2、x3,求该系统的动态方程(状态方程和输出方程)。
②根据①所求出的动态方程,判断系统的可控性和可观测性。
③求该系统的矩阵指数eAi。







 试确定a,b值,使系统完全可控、完全可观。
试确定a,b值,使系统完全可控、完全可观。








