题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
G92X20Y50Z30M03表示点(20,50,30)为:()。
A.点(20,50,30)为刀具的起点
B.程序起点
C.点(20,50,30)为机床参考
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.点(20,50,30)为刀具的起点
B.程序起点
C.点(20,50,30)为机床参考
如果结果不匹配,请 联系老师 获取答案
 更多“G92X20Y50Z30M03表示点(20,50,30)为:…”相关的问题
更多“G92X20Y50Z30M03表示点(20,50,30)为:…”相关的问题
“P3”型系列仪器意指()。
A.表示归算到100m时,所测地形点的全部误差小于±30cm的平板仪;
B.表示1km往返测偶然中误差不超过±4mm的水准仪;
C.表示一测回方向中误差为±2″的经纬仪;
D.2mm+2ppm的测距仪。
“S3”型系列仪器意指()。
A.表示归算到100m时,所测地形点的全部误差小于±30cm的平板仪;
B.表示1km往返测偶然中误差不超过±4mm的水准仪;
C.表示一测回方向中误差为±2″的经纬仪;
D.2mm+2ppm的测距仪。
“J2”型系列仪器意指()。
A.表示归算到100m时,所测地形点的全部误差小于±30cm的平板仪;
B.表示1km往返测偶然中误差不超过±4mm的水准仪;
C.表示一测回方向中误差为±2″的经纬仪;
D.2mm+2ppm的测距仪。
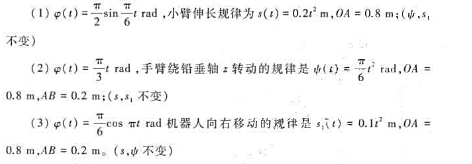
所示。试分别在下列各种条件下求手腕处点B的绝对速度和绝对加速度。
设计一个point(点)类: (1)该类具有成员变量x,y(表示点的横、纵坐标); (2)定义一个有参构造方法point(int x,int y),将其一对坐标值作为参数,其中x,y为给定坐标值; (3)定义一个无参的构造方法point()(令两坐标值均为0); (4)设计一个实例方法distance(point p1,point p2),实现求坐标轴上两个点的距离(Java中的开平方根函数为Math.sqrt()),其方法的声明为:double distance(point p1,point p2) 。 编写Test类,在其main方法中创建2个point对象,对应点(10,10)和点(20,25),再调用distance(point p1,point p2)方法计算出两点之间的距离并输出该值。
表示商品1和商品2的数量,线段AB为消费者的预算线,曲线
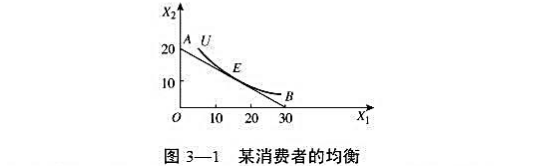
U为消费者的无差异曲线,E点为效用最大化的均衡点。已知商品1的价格P1=2元。
(1)求消费者的收入;
(2)求商品2的价格P2;
(3)写出预算线方程;
(4)求预算线的斜率;
(5)求E点的MRS12的值。
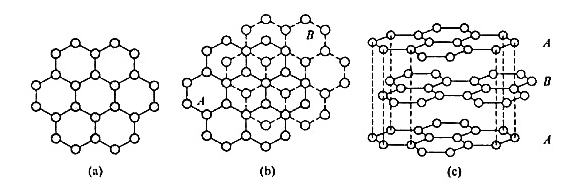
结构图(c)说明,层与层之间等间距平行排列,且以ABAB方式堆积。试回答下列问题:
(1)说明石墨单层结构基元的构成情况;
(2)用中心加黑点的碳原子●表示阵点,间出石墨单层对应的点阵,并画出平行四边形的点阵素单位;
(3)说明石墨晶体结构基元的构成情况;
(4)用中心加黑点的碳原子●表示阵点,画出石墨晶体对应的点阵;
(5)在((4)的基础上,在点阵中画出一个上底面含有60°角的点阵素单位;
(6)上述点阵素单位平行六面体所对应的石墨晶体中含有几个碳原子?试
画图说明这个平行六面体石墨晶体中各碳原子的位置。