 ,试求闭环传递函数
,试求闭环传递函数 。(提示:应用信号流图及梅森公式。)
。(提示:应用信号流图及梅森公式。)
 如果结果不匹配,请
如果结果不匹配,请 
 更多“已知系统的方框图如图2所示,试求闭环传递函数。(提示:应用信…”相关的问题
更多“已知系统的方框图如图2所示,试求闭环传递函数。(提示:应用信…”相关的问题
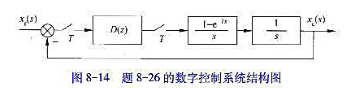
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
某因果数字滤波器的零、极点如图10-25(a)所示,并已知其 .试求:
.试求:
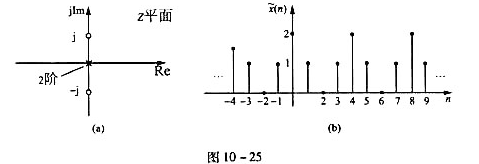
(1)它的系统函数H(z)及其收敛域,且回答它是IIR还是FIR的什么类型(低通、高通、带通、带阻或全通)滤波器?
(2)写出图10-25(b)所示周期信号 的表达式,并求其离散傅里叶级数的系数;
的表达式,并求其离散傅里叶级数的系数;
(3)该滤波器对周期输入的响应y[n].
线,(1)若要求放大器稳定工作,试求最小的反馈电阻Rf值.(2)若要求闭环中频增益Af1=
40dB,则必须在Rf上并接补偿电容Cf才能保证放大器稳定工作,试求Rf、Cf值,并指出为何种补偿.

相应的V0值,并分析比较(1)、(2)中V0值.

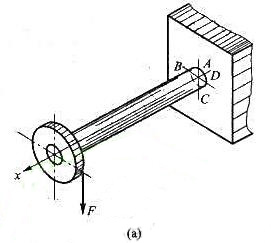
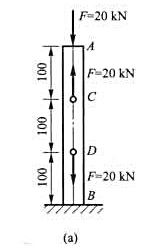
一长为300mm的钢杆,其受力情况如图(a)所示。已知杆横截面面积A=1000mm2,材料的弹性模量E=200GPa,试求:
(1)AC、CD、DB各段横截面上的应力和纵向变形;
(2)杆AB的总纵向变形。
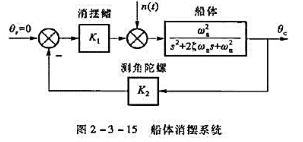
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
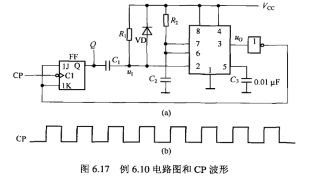
由主从JK触发器和555定时器组成的电路如图6.17(a)所示.已知CP为10Hz的方波,如图6.17(b)所示.R1=10kΩ、R2=56kΩ、C1=1000pF、C2=4.7uF,触发器Q端及555输出端(3端)初态均为“0".
(1)试画出Q端,u1、uO相对于CP脉冲的波形.
(2)试求Q端输出波形的周期.
水箱液面高度控制系统的三种原理方案如图2-1-1所示。在运行中,希望液面高度H维持不变。
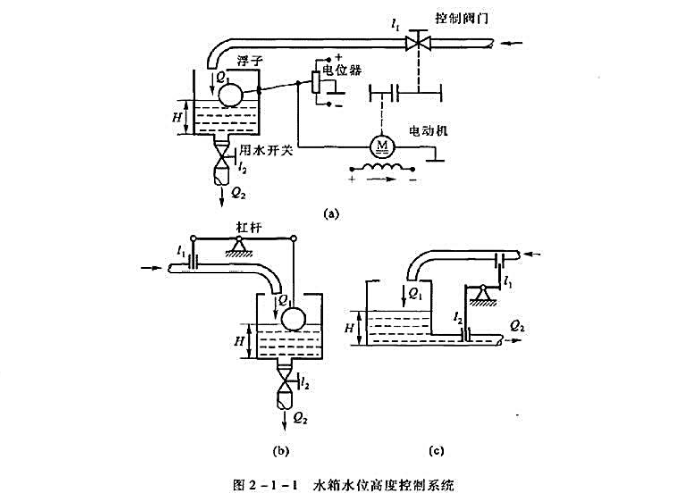
①试说明各系统的工作原理。
②画出各系统的方框图,并指出被控对象、被控量、给定值、干扰量是什么?
③试说明各系统属于哪种控制方式。
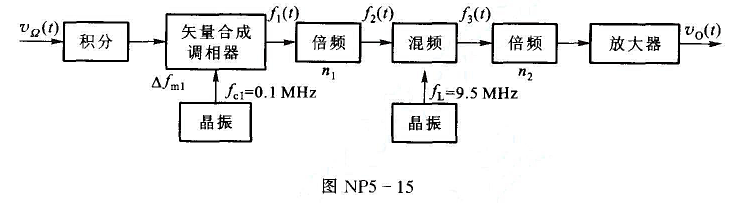
ΩmcosΩt,混频器输出频率f3(t)=fL-f2(t),矢量合成法调相器提供的调相指数为0.2rad。试求:(1)倍频次数n1和n2;(2)f1(t)、f2(t)、f3(t)的表示式。
已知由差分方程

表示的因果数字滤波器(即离散时间因果LTI系统),试求:
(1)该滤波器的系统函数H(z),并概画出其零极点图和收敏域;
(2)该滤波器稳定吗?若稳定,概画出它的幅频响应 或
或 ,并指出它是什么类型的滤波器(低通、高通、带通、全通、最小相移等);
,并指出它是什么类型的滤波器(低通、高通、带通、全通、最小相移等);
(3)画出它用离散时间三种基本单元构成的级联实现结构的方框图或信号流图.
(1)用单元体画出在A、B、C、D各点处的应力状态;
(2)求A点的主应力和最大切应力及其作用面的方位。