题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
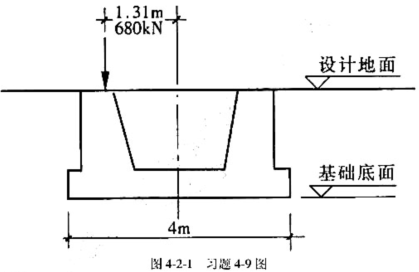
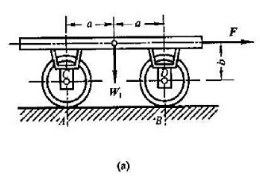
某构筑物基础如图4-2-1所示,在设计地面标高处作用有偏心荷载680kN, 偏心距1.31m, 基础埋深为
2m,底而尺寸为4mx2m。试求基底平均压力p和边缘最大压力Pmax,并绘出沿偏心方向的基底压力分布图。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“某构筑物基础如图4-2-1所示,在设计地面标高处作用有偏心荷…”相关的问题
更多“某构筑物基础如图4-2-1所示,在设计地面标高处作用有偏心荷…”相关的问题
某被控对象的传递函数如图2-9-8所示。
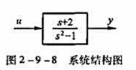
设计该系统的一个状态观测器,使其极点位于-6,-6。

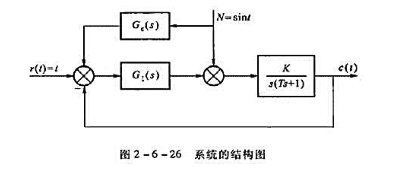
系统的结构图如图2-6-26 所示。图中K>0,T>0,误差的定义为R-C。
①设计G1(s)、Gc(s)使系统在干扰N和控制输入r同时作用下无稳态误差。
②若不采用图中的干扰补偿方案,而改为只用G1(s)来消除干扰N和r同时作用下的稳态误差,问G1(s)应如何设计,说明G1(s)结构和参数应满足的条件。
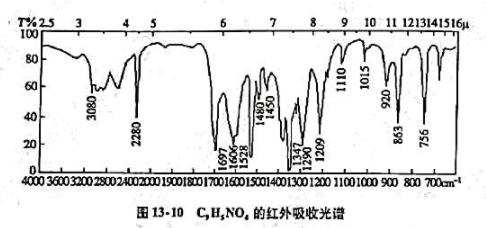
某未知化合物的分子式为C9H5NO4,测得其红外吸收光谱如图13-10所示。试通过光谱解析推断其分子结构式。
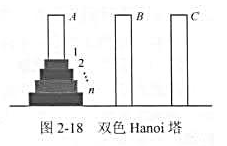
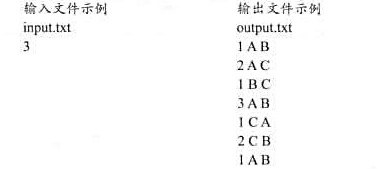
规则I:每次只能移动1个圆盘:
规则II:任何时刻都不允许将较大的圆盘压在较小的圆盘之上;
规则III:任何时刻都不允许将同色圆盘叠放在一起:
规则IV:在满足移动规则I~III的前提下,可将圆盘移至A、B、C中任一塔座上.
试设计一个算法,用最少的移动次数将塔座A上的n个圆盘移到塔座B上,并仍按同样顺序叠置.
算法设计:对于给定的正整数n,计算最优移动方案.
数据输入:由文件input.txt给出输入数据.第1行是给定的正整数no.
结果输出:将计算出的最优移动方案输出到文件output.txt.文件的每行由一个正整数k
和2个字符c1和c2组成,表示将第k个圆盘从塔座c1移到塔座c2上.
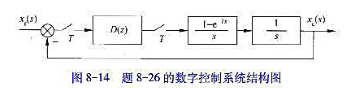
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
某系统结构图如图2-9-7所示
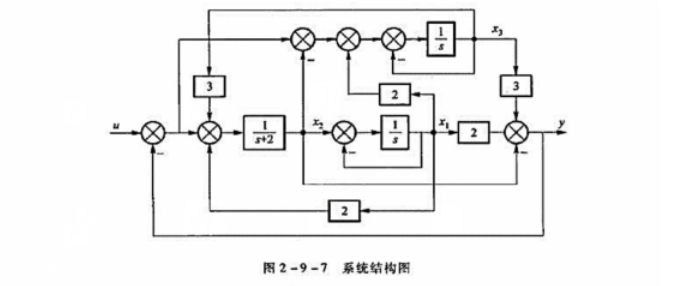
①据图2-9-7所给出的系统状态变量x1、x2、x3,求该系统的动态方程(状态方程和输出方程)。
②根据①所求出的动态方程,判断系统的可控性和可观测性。
③求该系统的矩阵指数eAi。







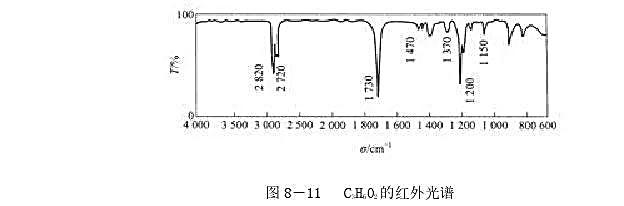
 ,红外光谱如图8-11所示。解析该化合物的结构。
,红外光谱如图8-11所示。解析该化合物的结构。