 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
超调量是表示系统()的一个指标,其值越小,说明调节过程越()。
超调量是表示系统()的一个指标,其值越小,说明调节过程越()。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“超调量是表示系统()的一个指标,其值越小,说明调节过程越()…”相关的问题
更多“超调量是表示系统()的一个指标,其值越小,说明调节过程越()…”相关的问题
有一个闭环系统,其控制对象的传递函数为

要求校正为典型Ⅱ型系统,在阶跃输入下系统超调量 %≤30%(按线性系统考虑)。试决定调节器结构,并选择其参数。
%≤30%(按线性系统考虑)。试决定调节器结构,并选择其参数。
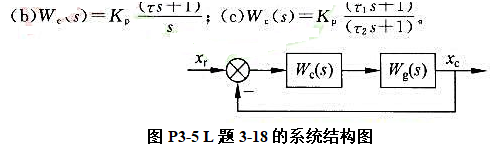
如图P3-5所示系统,图中的Ws(5)为调节对象的传递函数,Wc(s)为调节器的传递函数。如果被控对象为 ,系统要求的指标为:位置稳态误差为等,调节时间最短,超调量σ%≤4.3%,问下述三种调节器中哪一种能满足上述指标?其参数应具备什么条件?三种调节器分别为(a)Wc(s)=Kp
,系统要求的指标为:位置稳态误差为等,调节时间最短,超调量σ%≤4.3%,问下述三种调节器中哪一种能满足上述指标?其参数应具备什么条件?三种调节器分别为(a)Wc(s)=Kp
A.增加非主导极点,系统的超调量减小
B.增加非主导极点,系统的峰值时间增大
C.增加附加零点,系统的峰值时间减小
D.增加附加零点,系统的超调量减小
已知单位反馈系统I, II, II均为最小相位系统,其开环对数幅频特性的渐近线分别在图5-7中给出,
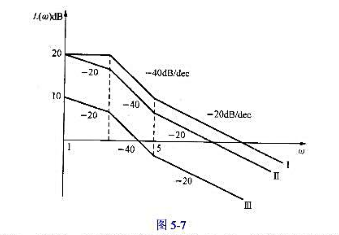
试完成:
(1)求出各系统分别对单位阶跃输入和单位斜坡输入时的稳态误差;
(2)分析比较系统II和系统对于阶跃输入的超调量。
A.休止角测定方法简便,故常作为粉体的一个物理常数
B.休止角越小,表示流动性越好
C.测定粉体自由流动所需玻璃球的量越多,表示流动性越好
D.压缩度越大,表示流动性越好
已知系统的开环传递函数为

试采用根轨迹法设计微分校正装置Ge(G),使得系统的超调量Mp<20%,过波时间
ts<4秒,井比较校正前后系统的稳态性能。
单位负反馈系统的开环传递函数为

试计算下列参数:超调量σ%、调节时间te、峰值时阀tp,截止频率ωe、谐振峰值Mm、谐振频率ωm、频带ωb、相稳定裕度γ、模稳定裕度h。
已知系统结构图如图4-10所示。
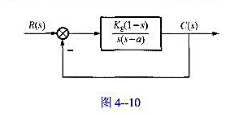
(1)当a=3时,画出Kg从0变化到+∞时的根轨迹,确定系统无超调时Kg的取值范围及系统的临界稳定时的Kg值;
(2)当Kg=3时,画出a从0变化到+∞时的根轨迹,确定系统 时的a值。
时的a值。

















