

 如果结果不匹配,请
如果结果不匹配,请 
 更多“闭环控制系统的时域性能指标是?”相关的问题
更多“闭环控制系统的时域性能指标是?”相关的问题
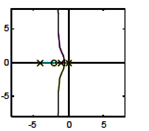
设单位反馈控制系统的开环传递函数为

若要求其闭环主导极点的阻尼角为60°,试用根轨迹法确定该系统的动态性能指标Mp、tp、tk和稳态性能指标Ky。
闭环控制系统是指控制器与被控对象之间既有顺向控制,又有()的自动控制系统。
A.反向联系
B.直接联系
C.操纵变量
已知系统的开环传递函数为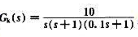 试完成:
试完成:
(1)判断闭环系统的稳定性;
(2)若实施中联校正,校正装置为 ,计算校正后的穿越频率ωc和相角裕量γ;
,计算校正后的穿越频率ωc和相角裕量γ;
(3)该校正装置是超前还是滞后网络?对系统动态性能指标有何改善?
(4)该校正装置对系统的静态性能有无影响?为什么?
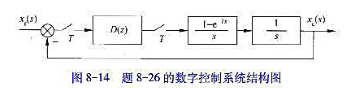
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
反馈控制系统的开环传递函数为
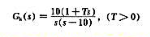
(1)画出系统开环幅相曲线的大致形状,并分别标出系统的稳定和不稳定时(-1, j0) 点的位置;
(2)由频率特性计算出闭环系统稳定时T的临界值。
一单位反馈控制系统的开环传递函数为
已知系统的x(t)=1(t),误差时间函数为e(t)=1.4e1.07t-0.4-3.73,求系统的阻尼比ζ、自然振荡角频ω0率 、系统的开环传递函数和闭环传递函数、系统的稳态误差。
姿态航向系统2号姿态航向计算机给右驾驶的电子式仪表系统提供姿态航向数据给:
A.左驾驶的无线电磁指示器提供航向信号,给右驾驶的飞行控制系统提供姿态航向数据
B.右驾驶的无线电磁指示器提供航向信号,给左驾驶的飞行控制系统提供姿态航向数据
C.给气象雷达提供姿态信号,给防撞系统提供姿态航向信号
D.给飞行数据记录系统,增强型近地警告系统提供姿态航向信号给GPS/导航管理系统提供航向信号
光源和()是光纤测试仪的两个装置组成。
A.光时域反射仪
B.光谱分析仪
C.示波仪
D.光功率计















