如果结果不匹配,请
如果结果不匹配,请 
 更多“稳态误差是指系统稳定后系统的输出信号与输入信号之间的差。()”相关的问题
更多“稳态误差是指系统稳定后系统的输出信号与输入信号之间的差。()”相关的问题
设速度控制系统如图2-3-12所示。
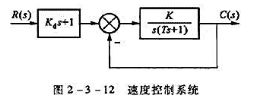
为了消除系统的稳态误差,使斜坡信号通过由比例-微分环节组成的滤波器后再进入系统。
①当Kd=0时,求系统的稳态误差(e=r-c)。
②选择Kd,使系统的稳态误差为零。
已知单位反馈系统I, II, II均为最小相位系统,其开环对数幅频特性的渐近线分别在图5-7中给出,
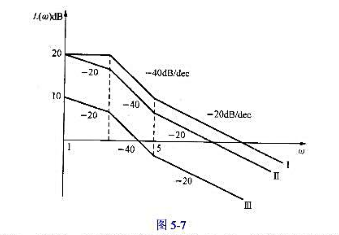
试完成:
(1)求出各系统分别对单位阶跃输入和单位斜坡输入时的稳态误差;
(2)分析比较系统II和系统对于阶跃输入的超调量。
单位负反馈控制系统的开环传递函数

输入信号为r(t)=(a+bt)·1(t)(a,b为常数)。试求系统稳态误差enn≤ε时各参数应保持的关系(e=r-c)。
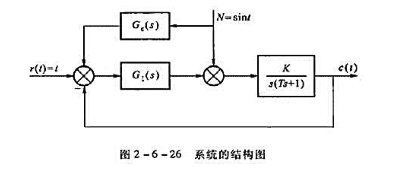
系统的结构图如图2-6-26 所示。图中K>0,T>0,误差的定义为R-C。
①设计G1(s)、Gc(s)使系统在干扰N和控制输入r同时作用下无稳态误差。
②若不采用图中的干扰补偿方案,而改为只用G1(s)来消除干扰N和r同时作用下的稳态误差,问G1(s)应如何设计,说明G1(s)结构和参数应满足的条件。
单位负反馈系统的开环传递函数为
若系统输入为r(t)=5sinωt,问ω取何值时系统稳态输出的振幅最大,并求出此最大振幅。
一单位反馈控制系统的开环传递函数为
已知系统的x(t)=1(t),误差时间函数为e(t)=1.4e1.07t-0.4-3.73,求系统的阻尼比ζ、自然振荡角频ω0率 、系统的开环传递函数和闭环传递函数、系统的稳态误差。
()的主要功能是尽可能完整地把外界声音信号进行放大后再进行压缩处理,以满足听障患者的需求,扩展听障患者的听觉动态范围,并提供完美的音质和舒适度。
A.压缩系统
B.增益
C.放大系统
D.最大声输出
E.传声器
A.液压动力转向系统是一个位置跟踪装置,滑阀的运动是输入信号,转向螺杆是输出信号
B.液压随动系统是一个力的放大装置,动力缸活塞的推力由油压决定
C.动力缸活塞的移动必须落后于滑阀移动一段距离
D.动力缸活塞与滑阀间存在机械反馈联系
已知单位负反馈系统的开环传递函数为:
其中K>0、T>0。试确定使闭环系统稳定时,参数K、T应满足的关系:并计算在输入r(t)=tX1(t)作用下系统的稳态误差。
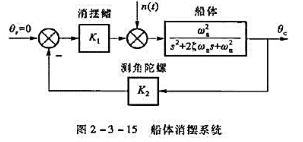
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
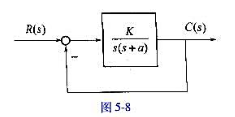
系统如图所示,K>0, 输入r(t)=Acos3t 时,从示波器中观测到输入,输出的幅值相等,相位差90°。
(1)确定参数a,K;
(2)若输入r(t)=3cosωt.确定ω为何值时,稳态输出c(t)的幅值最大,并求出此最大幅值。