 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
在R4中取两个基 (1)求由前一个基到后一个基的过渡矩阵. (2)求向量(x1,x2,x3,x4)T在后一个基下的坐标.
在R4中取两个基
 (1)求由前一个基到后一个基的过渡矩阵.
(1)求由前一个基到后一个基的过渡矩阵.
(2)求向量(x1,x2,x3,x4)T在后一个基下的坐标.
(3)求在两个基下有相同坐标的向量.
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在R4中取两个基
(1)求由前一个基到后一个基的过渡矩阵.
(2)求向量(x1,x2,x3,x4)T在后一个基下的坐标.
(3)求在两个基下有相同坐标的向量.
如果结果不匹配,请 联系老师 获取答案
 更多“在R4中取两个基 (1)求由前一个基到后一个基的过渡矩阵. …”相关的问题
更多“在R4中取两个基 (1)求由前一个基到后一个基的过渡矩阵. …”相关的问题
已知,在R4中,α1=(1,1,1,1),α2=(1,1,-1,-1),α3=(1,-1,1,-1)
α4=(1,-1,-1,1)与β1=(1,2,-1,0),β2=(-2,-3,2,2),β3=(1,2,0,2),β4=(1,2,-1,1)都作基.求{β1,β2,β3,β4}到{α1,α2,α3,α4}的过渡矩阵.并求向量α=(1,2,1,1)在基{β1,β2,β3,β4}下的坐标.
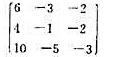
在R3中取两个基α1=(1 2 1)T,α2=(2 3 3)T,α3=(3 7 —2)T和β1=(3 1 4)T,β2=(5 2 1)T,β3=(1 1 —6)T,试求坐标变换公式.
R3中,取两个基
α1=(1,2,-2)T,α2=(2,3,3)T,α3=(3,7,1)T;
β1=(3,1,4)T,β2=(5,2,1)T,β3=(1,1,-6)T,试求坐标变换公式.
设{α1,α2,···,αn}和{β1,β2,···,βn}是n维欧氏空间V的两个规范正交基。
(i)证明:存在V的一个正交变换σ,使σ(αi)=βi,i=1,2,...,n;
(ii)如果V的一个正交变换τ使得τ(α1)=β1,那么τ(α2),···,τ(αn)所生成的子空间与由β2,···,βn所生成的子空间重合。
今有一干燥器,湿物料处理量为800kg/h。要求物料干燥后含水量由30%减至4%(均为湿基)。干燥介质为空气,初温15℃,相对湿度为50%,经预热器加热至120℃进入干燥器,出干燥器时降温至45℃,相对湿度为80%。试求:(1)水分蒸发量W;(2)空气消耗量L、单位空气消耗量l;(3)如鼓风机装在进口处,求鼓风机之风量V。
令V是实数域R上一个三维向量空间,σ是V的一个线性变换。它关于V的某一个基的矩阵是
(i)求出σ的最小多项式p(x),并把p(x)在R[x]内分解为两个最高次项系数是1的不可约多项式p1(x)与p2(x)的乘积;
(ii)令Wi={ξ∈V|pi(σ)ξ=0},i=1,2。证明,Wi是σ的不变子空间,并且V=W1⊕W2;
(iii)在每一子空间Wi中选取一个基,凑成V的一个基,使得σ关于这个基的矩阵里只出现三个非零元素。
如图所示的装置可以测量汽车在水平路面上做匀加速直线运动的加速度,该装置在矩形箱子的前、后壁上各安装一个由力敏电阻组成的压力传感器,用两根相同的轻弹簧夹着一个质量为2.0kg的滑块,滑块可无摩擦滑动,两弹簧的另一端分别压在传感器a、b上,其压力大小可直接从传感器的液晶显示屏上读出。现将该装置沿运动方向固定在汽车上,传感器b在前,传感器a在后,汽车静止时,传感器a、b的示数均为10N。(取g=10m/s2)。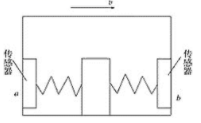
问题1、若传感器a的示数为14N、b的示数为6N,求此时汽车的加速度大小和方向。
问题2、求当汽车以怎样的加速度运动时,传感器a的示数恰为零。
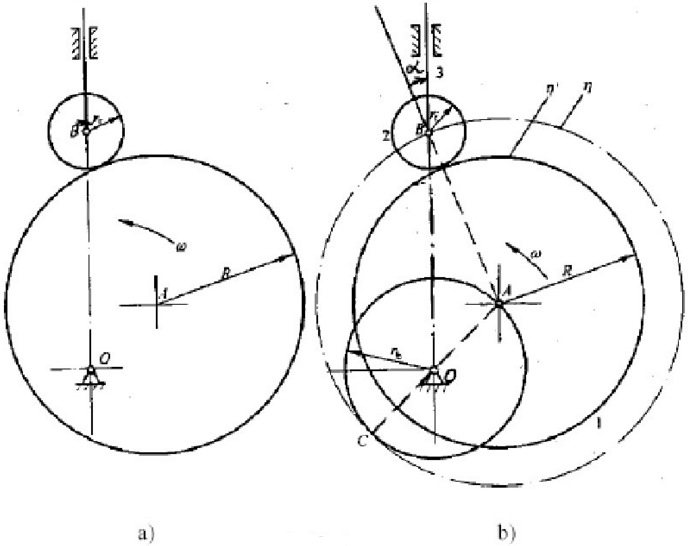
图(a)所示的偏置直动滚子从动件盘形凸轮机构中,凸轮为一偏心圆盘,其半径R=40mm,由凸轮转动中心O到圆盘中心A的距离为OA=25mm,滚子半径rg=10mm,从动件导路方向线与凸轮转动中心O的偏置距离为e=10mm。凸轮逆时针方向转动。试用图解法求:
(1)凸轮的理沦轮廓线;
(2)凸轮的基圆;
(3)凸轮转过角度φ=90°时,从动件的位移量s及该位置所对应的压力角α;
(4)从动件的最大升距h;
(5)若改变滚子的半径,从动件的运动规律有无变化?为什么?
A.主分量分析的最佳准则是对一组数据进行按一组正交基分解,在只取相同数量分量的条件下,以均方误差计算截尾误差最小
B.在经主分量分解后,协方差矩阵成为对角矩阵
C.主分量分析就是K-L变换
D.主分量是通过求协方差矩阵的特征值得到

















